
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
places
Zurich, Switzerland
Published:
Short description of Zurich 
projects
C-nake
Published:
A classic Snake game implemented in pure C++ for the command line, developed as a learning project to explore real-time logic, input handling, and object-oriented programming principles.
Crazy Turtle
Published:
An advanced control framework for ROS turtlesim implementing non-blocking goal navigation, feedback control, and intelligent wall avoidance using action-server-based communication.
2WD Rosduino
Published:
A differential-drive Arduino robot controlled via ROS and an Xbox controller, featuring both teleoperation and autonomous obstacle avoidance. This project introduced the foundations of robotic control architectures and real-time communication pipelines.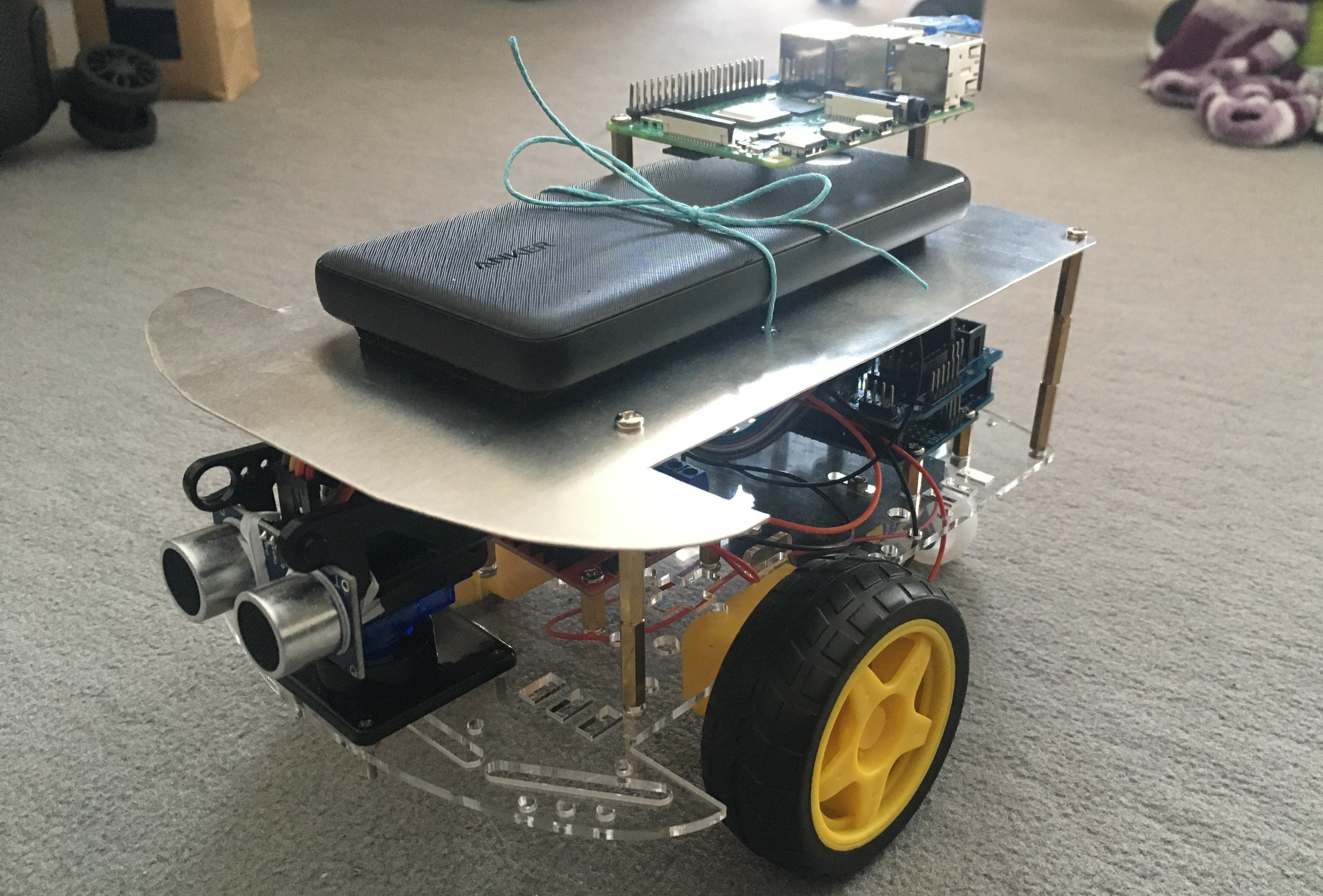
Autonomous Driller
Published:
A high-torque vehicle powered by a repurposed drilling machine motor, combining 3D-printed mechanics with ROS-based perception, SLAM, and navigation. Designed as an experimental platform for exploration and autonomous delivery.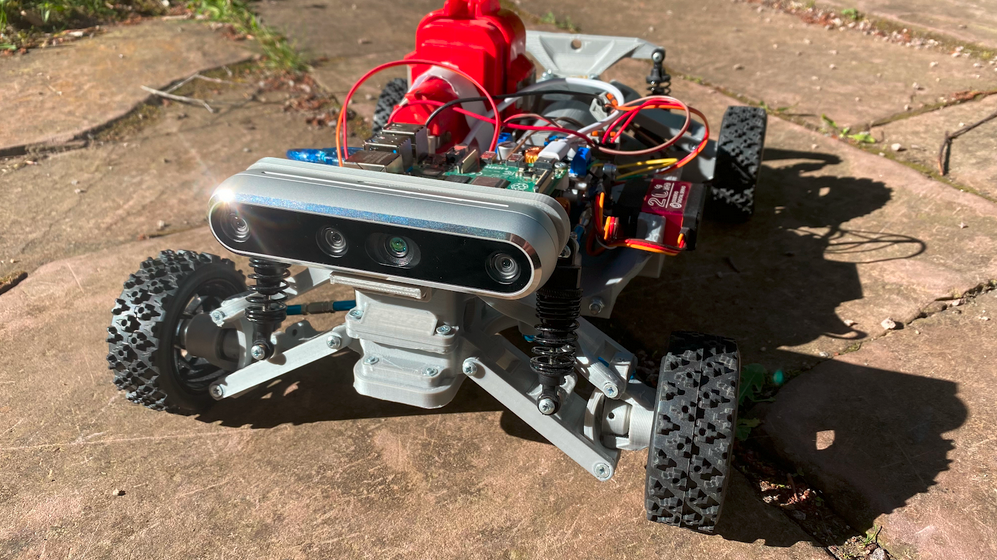
publications
Experimental closed-loop excitation of nonlinear normal modes on an elastic industrial robot
Published in IEEE Robotics and Automation Letters, 2022
An experimental method for exciting and analyzing nonlinear normal modes in elastic industrial manipulators, enabling precise characterization of nonlinear oscialltory behavior and closed-loop control strategies.
Recommended citation: F. Bjelonic, A. Sachtler, A. Albu-Schäffer, and C. Della Santina, “Experimental closed-loop excitation of nonlinear normal modes on an elastic industrial robot,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1689–1696, 2022.
Download Paper | Download Bibtex
Learning-based design and control for quadrupedal robots with parallel-elastic actuators
Published in IEEE Robotics and Automation Letters, 2023
This work presents a learning-based co-design approach that jointly optimizes compliant actuation and control policies, demonstrating improved energy efficiency and robust performance in quadrupedal robots equipped with parallel-elastic actuators.
Recommended citation: F. Bjelonic, J. Lee, P. Arm, D. Sako, D. Tateo, J. Peters, and M. Hutter, “Learning-based design and control for quadrupedal robots with parallel-elastic actuators,” IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1611–1618, 2023.
Download Paper | Download Bibtex
Marladona-towards cooperative team play using multi-agent reinforcement learning
Published in IEEE International Conference on Robotics and Automation (ICRA), 2025
A multi-agent reinforcement learning framework for cooperative robotic team play, enabling coordinated behaviors and strategic interaction through decentralized policies and shared objectives.
Recommended citation: Z. Li, F. Bjelonic, V. Klemm, and M. Hutter, “Marladona – Towards cooperative team play using multi-agent reinforcement learning,” in Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 15014–15020, 2025.
Download Paper | Download Bibtex
Learning quiet walking for a small home robot
Published in IEEE International Conference on Robotics and Automation (ICRA), 2025
This paper introduces a reinforcement learning approach for generating quiet and stable walking behaviors in small home robots, focusing on minimizing acoustic emissions while preserving locomotion robustness and natural motion.
Recommended citation: R. Watanabe, T. Miki, F. Shi, Y. Kadokawa, F. Bjelonic, K. Kawaharazuka, A. Cramariuc, and M. Hutter, “Learning Quiet Walking for a Small Home Robot,” in Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), 2025.
Download Paper | Download Bibtex
Towards bridging the gap: Systematic sim-to-real transfer for diverse legged robots
Published in TBA, 2025
A unified framework for systematic sim-to-real transfer across diverse legged robots, combining data-driven system identification with evolutionary optimization to achieve robust and reproducible real-world locomotion performance.
Recommended citation: F. Bjelonic, F. Tischhauser, and M. Hutter, “Towards Bridging the Gap: Systematic Sim-to-Real Transfer for Diverse Legged Robots,” arXiv preprint arXiv:2509.06342, 2025.
Download Paper | Download Bibtex
PACE dataset for sim-to-real transfer in legged robots
Published in TBA, 2025
A comprehensive dataset capturing real and simulated actuator dynamics for systematic sim-to-real transfer, supporting reproducible research and benchmarking in learning-based legged robot control.
Recommended citation: F. Bjelonic, and M. Hutter, “PACE Dataset for Sim-to-Real Transfer in Legged Robots,” ETH Zurich Research Collection, 2025. Available: https://www.research-collection.ethz.ch/items/2277fcdc-ee56-41c7-b856-c3f3cb570ad1
Download Paper | Download Bibtex
robots
ANYmal
ANYmal is a compact, electrically driven quadruped with torque-controlled joints and a sealed, lightweight frame. It integrates lidar, cameras, and inertial sensors for reliable state estimation and locomotion on uneven terrain.
Daisy
Daisy builds on my torque-dense Tytan quadruped by mounting on top a dual-arm setup derived from the DynaArm from Duatic. With this hybrid design — a strong, agile four-legged base and two dexterous arms — Daisy serves as a versatile mobile manipulator capable of locomotion + manipulation in complex terrain and environments.
Magnecko
Magnecko is a student-built quadrupedal climbing robot that uses electromagnetic feet to crawl on walls, overhangs, and ceilings. I supervised the team on bridging the sim-to-real gap for reliable climbing behaviors.
Minimal
Minimal is a small-scale, mostly 3D-printed quadruped roughly the size of a standard stair, built with high-performance pseudo–direct-drive actuators and variable-gear joints.
Spacehopper
SpaceHopper is a small-scale three-legged hopping robot developed by students at ETH Zurich for future exploration of low-gravity environments like asteroids or small moons. It is designed to perform jumping locomotion with extended flight phases, using its legs for mid-air body reorientation.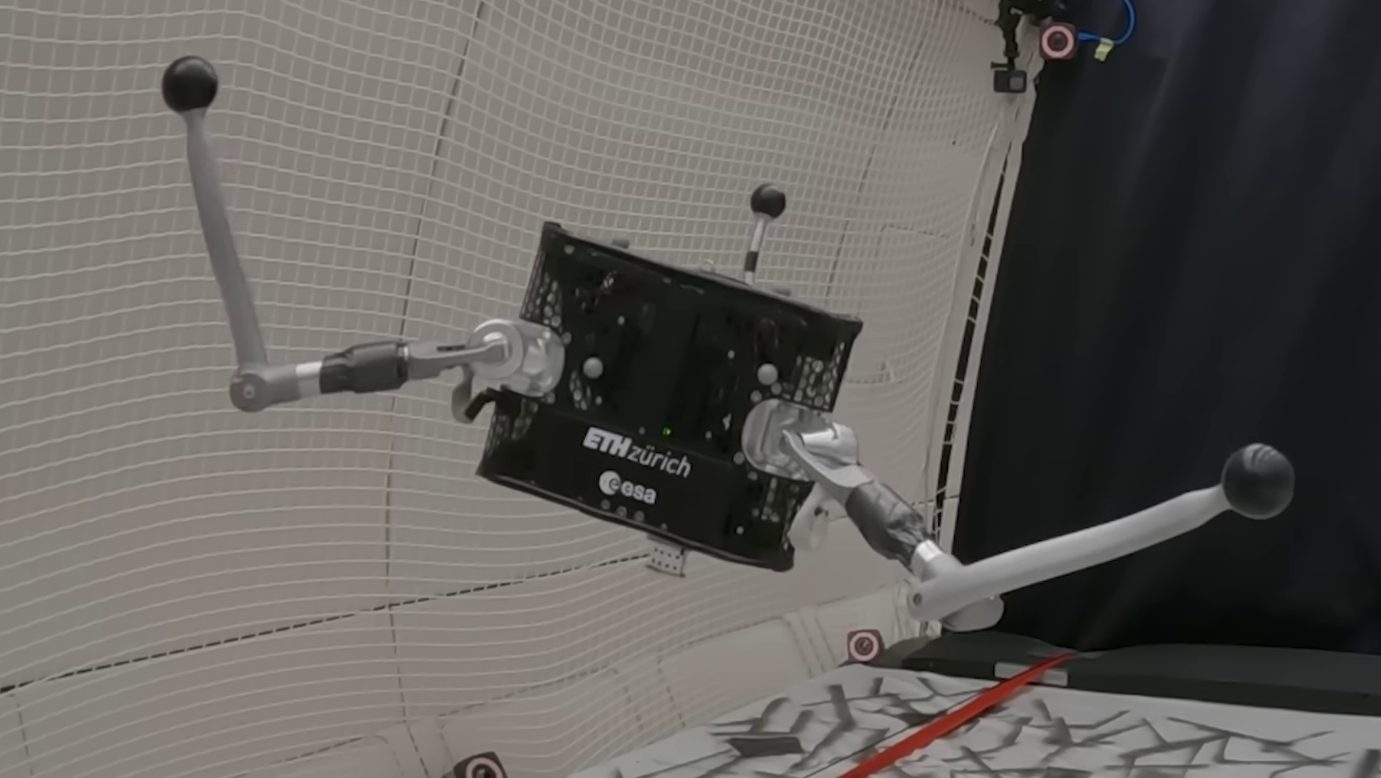
Tytan
Tytan is a high-torque quadruped built by combining the ANYmal main body with low-inertia, torque-dense legs. It is custom built at the Robotic Systems Lab.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.