ANYmal
ANYmal is a compact, electrically driven quadruped with torque-controlled joints and a sealed, lightweight frame. It integrates lidar, cameras, and inertial sensors for reliable state estimation and locomotion on uneven terrain.

ANYmal is a compact, electrically driven quadruped with torque-controlled joints and a sealed, lightweight frame. It integrates lidar, cameras, and inertial sensors for reliable state estimation and locomotion on uneven terrain.
Daisy builds on my torque-dense Tytan quadruped by mounting on top a dual-arm setup derived from the DynaArm from Duatic. With this hybrid design — a strong, agile four-legged base and two dexterous arms — Daisy serves as a versatile mobile manipulator capable of locomotion + manipulation in complex terrain and environments.
Magnecko is a student-built quadrupedal climbing robot that uses electromagnetic feet to crawl on walls, overhangs, and ceilings. I supervised the team on bridging the sim-to-real gap for reliable climbing behaviors.
Minimal is a small-scale, mostly 3D-printed quadruped roughly the size of a standard stair, built with high-performance pseudo–direct-drive actuators and variable-gear joints.
SpaceHopper is a small-scale three-legged hopping robot developed by students at ETH Zurich for future exploration of low-gravity environments like asteroids or small moons. It is designed to perform jumping locomotion with extended flight phases, using its legs for mid-air body reorientation.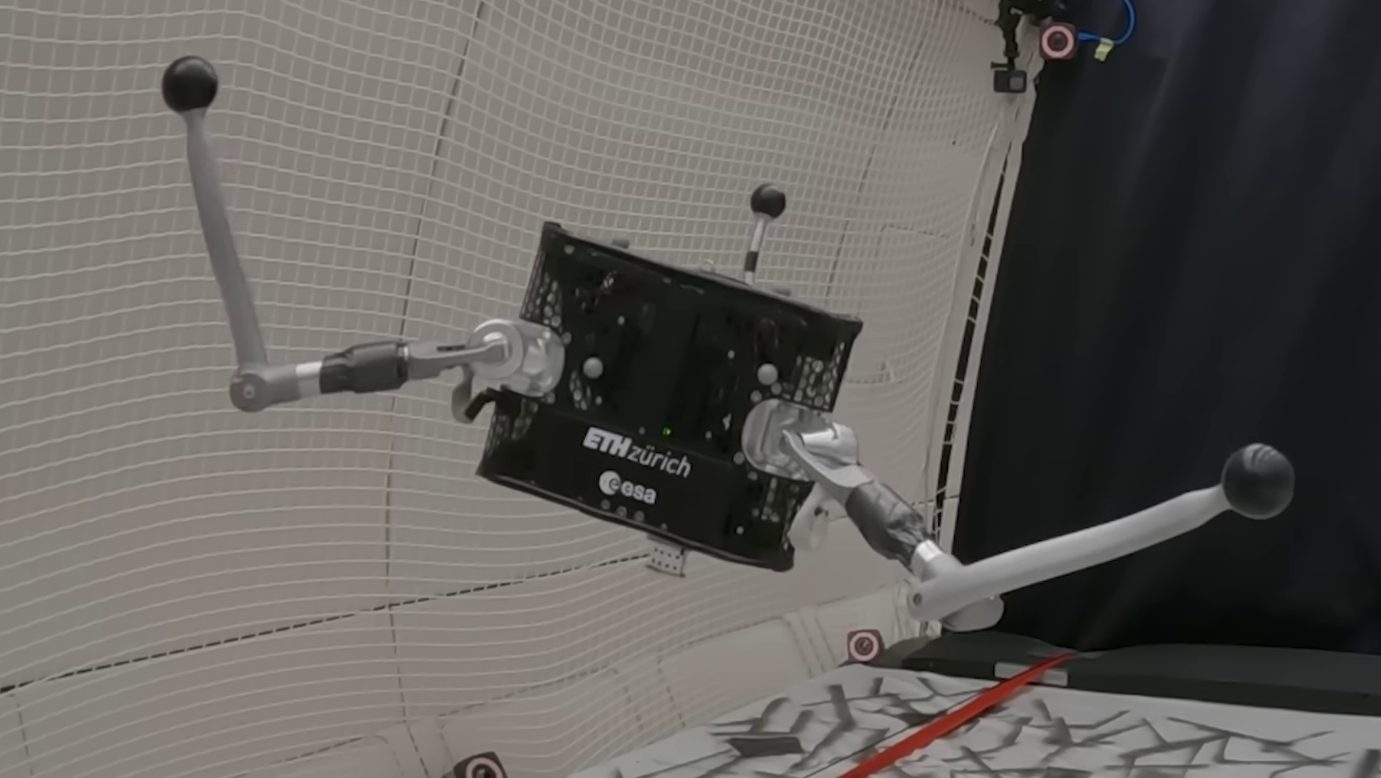
Tytan is a high-torque quadruped built by combining the ANYmal main body with low-inertia, torque-dense legs. It is custom built at the Robotic Systems Lab.