2WD Rosduino
Published:
2WD ROSduino
Differential-drive Arduino robot with ROS-based remote control and autonomous mode
Abstract
This project focuses on building a compact two-wheel differential-drive robot using standard electronic components and an Arduino-based control architecture.
The platform supports two operating modes:
- 🎮 Remote control via Xbox controller
- 🤖 Autonomous navigation using an ultrasonic distance sensor
The primary challenges involved designing a reliable electrical circuit, establishing a feasible ROS communication architecture, and implementing real-time control logic in C++.
The final result and real-world operation can be seen in the video section below.
Background Story
During the winter semester 2019/2020, I participated in — and won — a robotics challenge at TU Darmstadt. The competition involved autonomous pick-and-place of tennis balls using a TurtleBot3 equipped with a 5-DOF gripper arm.

A recording of the final run can be found here:
🎥 https://youtu.be/cxs0oeeQU-w
The prize was a standard Arduino-based 2WD car kit — which became the foundation for this project.
Initially, my goals were simple:
- Convert the kit into a remote-controlled vehicle
- Use an Xbox controller for intuitive control
- Integrate it with ROS for extensibility
This led to the introduction of a Raspberry Pi 4B as an intermediate control layer. While technically functional, it quickly revealed two limitations:
- The platform was overpowered from a computing perspective
- The mechanical drivetrain was underpowered
These insights eventually motivated the transition to the more ambitious Autonomous Driller project.
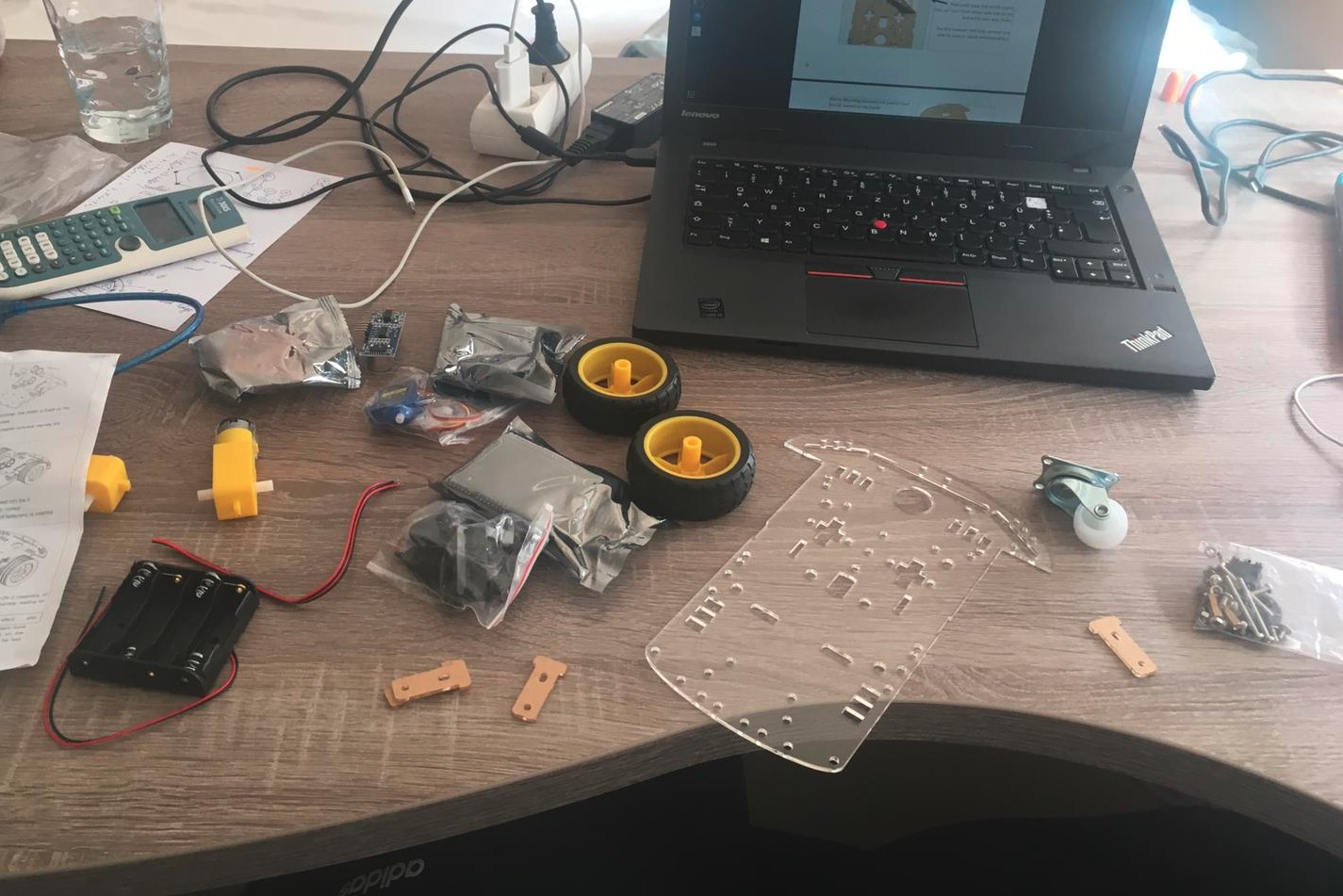
Assembly
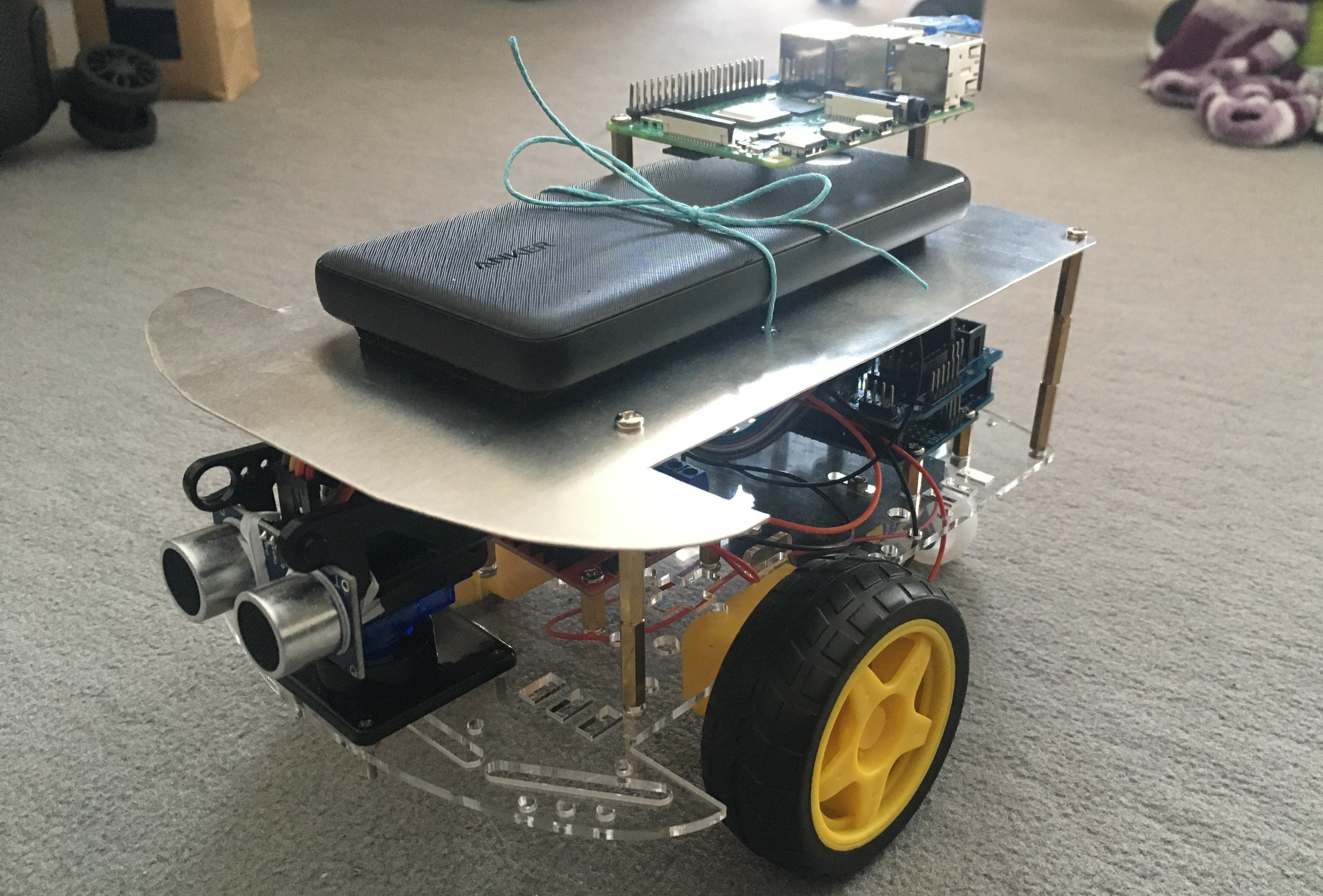
The base kit consisted of a standard 2WD chassis, dual DC motors, and a basic Arduino controller.
The full system architecture with my custom upgrades included:
- Arduino Uno for low-level motor control
- Raspberry Pi 4B for ROS integration
- Motor driver module
- Battery pack
- Ultrasonic sensor for obstacle detection
The assembly process involved modifying the standard kit for better cable routing, stable motor mounting, sensor integration and micro-controller integration.
Controller-to-Arduino Communication
The control pipeline was structured as follows:
Xbox Controller → Laptop → ROS Node → Raspberry Pi → Arduino
Communication Roles
Xbox Controller
Provides user input via joystick and buttons.Laptop
Maps controller input to velocity commands and transmits via ROS.Raspberry Pi
Acts as the ROS master node, handling command processing and forwarding.Arduino
Executes low-level motor control through PWM signals.
This architecture allowed seamless switching between:
- Manual teleoperation
- Autonomous obstacle-avoidance mode
Autonomous Mode
In autonomous mode, the ultrasonic sensor continuously measured distances ahead.
Simple logic ensured:
- Forward movement if clear
- Rotation if obstacle detected
- Adaptive correction depending on distance thresholds
This mode served as an introduction to sensor-based feedback control and robotic decision-making.
Video
First functional test with Xbox remote control and ROS-based communication:
Key Takeaways
This project marked my first end-to-end robotics system combining:
- Hardware assembly
- C++ embedded programming
- ROS architecture
- Real-world teleoperation
Although simple in hindsight, it laid the foundation for more complex systems — and ultimately inspired the transition toward high-performance autonomous platforms.
Small robot. First control loop. Big curiosity.