Crazy Turtle
Published:
Crazy Turtle
Advanced feedback control for ROS turtlesim with wall-avoidance and action-based goal handling

Abstract
This project explores the design and implementation of two feedback controllers for the ROS turtlesim environment, enhanced with a dynamic wall-avoidance strategy and an action-based goal interface.
Instead of relying on blocking terminal commands, the system utilizes:
- A ROS service for user interaction
- A ROS action server for goal tracking and execution
This architecture allows the user to change target positions for the turtle at any time without interrupting execution. The service node handles user input and forwards goals to the action server, which continuously steers the turtle toward the target while reporting state feedback such as distance and velocity.
As a result, goal updates are smooth, responsive, and non-blocking — closely mimicking real robotic control pipelines.
Background
I began learning ROS in mid-2019. Like many others, my journey started with the official tutorials, where one of the first visual tools introduced is the widely-known turtlesim.
The typical beginner setup involves:
- Running the turtlesim simulator
- Controlling the turtle via keyboard input using
teleop_twist_keyboard
While simple, this environment quickly became a playground for experimenting with control logic.
After mastering manual control, I aimed to push it further:
- Replace manual steering with autonomous control
- Introduce intelligent wall avoidance
- Integrate goal-based navigation logic
Thus, the Crazy Turtle was born.
Feedback Control with Wall Avoidance
Two different feedback control strategies were implemented and compared. Both aimed to steer the turtle toward a specified target while avoiding collisions with the simulation boundaries.
Core Concepts
- Continuous distance feedback to the goal
- Heading angle correction based on target orientation
- Penalization near boundaries using a wall cost function
The wall avoidance is implemented through a penalty-based approach. The closer the turtle approaches the boundary, the higher the cost applied to the control signal.
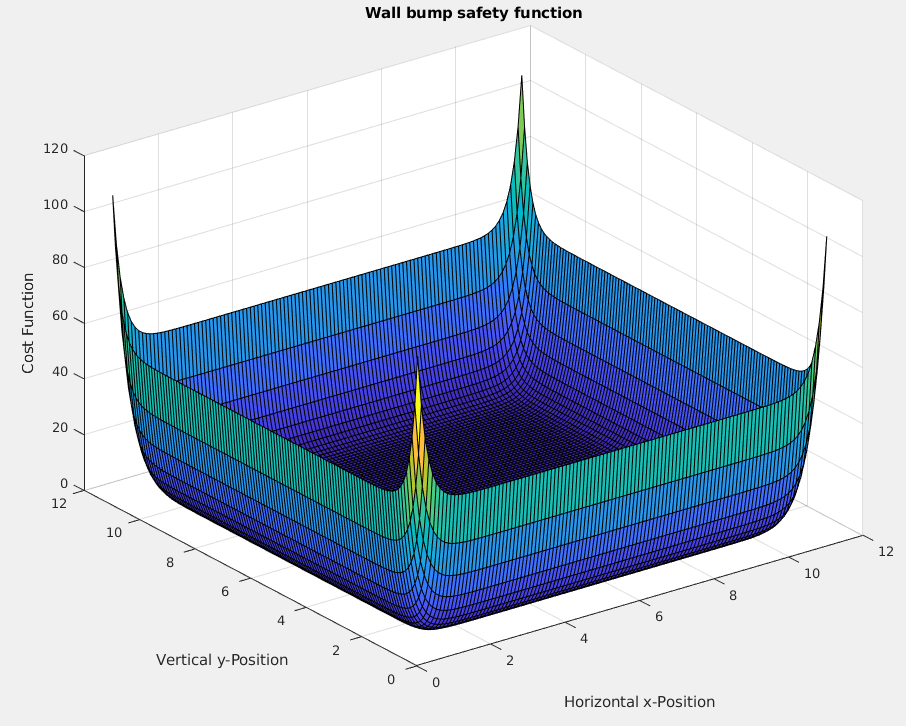
To maintain numerical stability in simulation, the cost function is clipped:
cost = min(cost, 20)
This prevents extreme corrective forces that lead to oscillations or instability near corners.
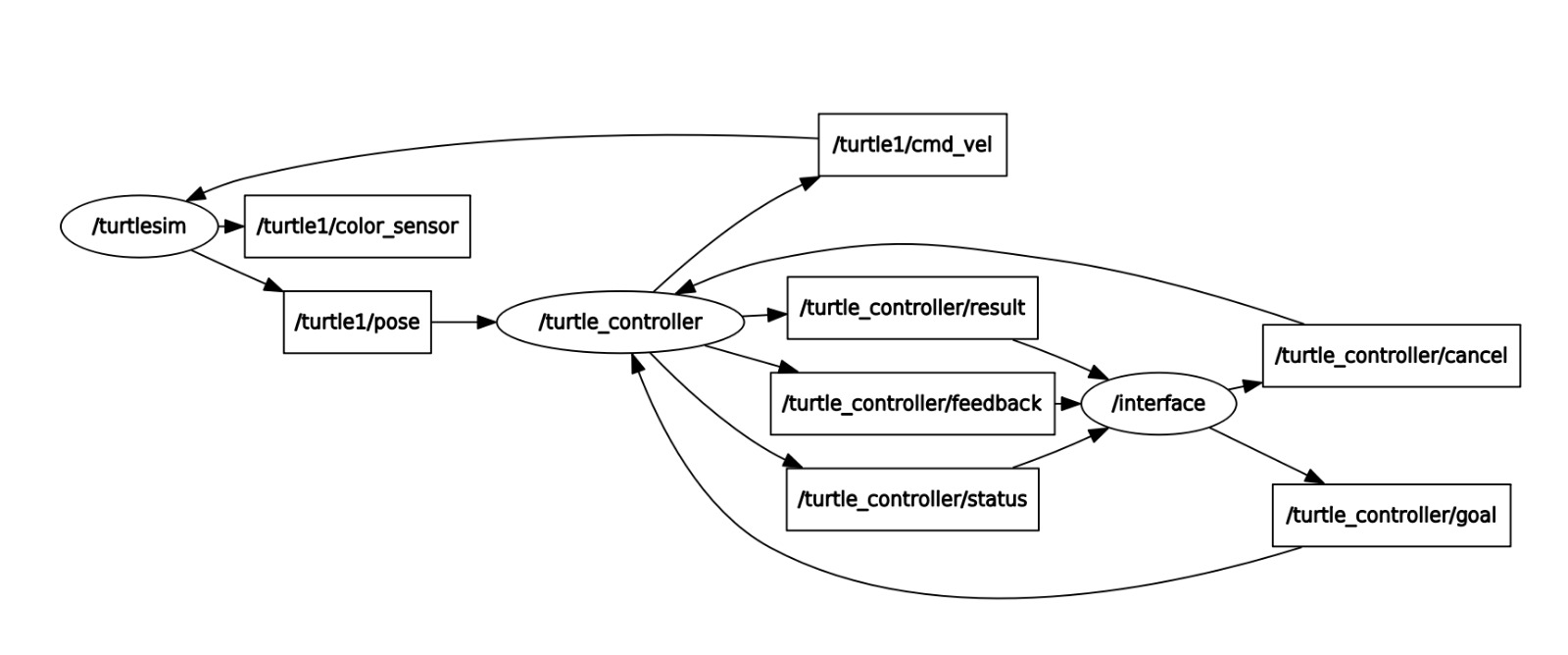
ROS Communication Architecture
Two additional ROS nodes were introduced:
1. Service Node
- Accepts user-defined turtle position goals
- Forwards goal requests to the action node
2. Action Node
- Executes navigation toward the goal
- Publishes feedback (current position, remaining distance)
- Allows real-time goal modification without blocking
Why use an Action Server?
| Feature | Service | Action |
|---|---|---|
| Blocking | Yes | No |
| Feedback | No | Yes |
| Goal modification | No | Yes |
| Continuous execution | No | Yes |
Using an action server enables interactive, real-time control — similar to real-world navigation stacks.
Implementation Highlights
- Feedback-based pose control
- Online goal switching without execution interruption
- Dynamic obstacle (wall) avoidance
- ROS message-based modularity
- Action-service hybrid communication
This structure closely follows patterns seen in professional robotic navigation systems.
Video Demonstration
Final demonstration showing dynamic goal switching and continuous wall-avoidance behavior:
Key Takeaways
This project provided hands-on experience with:
- ROS action architecture
- Feedback control design
- Wall avoidance logic
- Non-blocking robotic command interfaces
It was a crucial step toward more advanced navigation and autonomy pipelines — and a playful experiment in making a simple turtle behave intelligently.
Small turtle. Serious control theory.