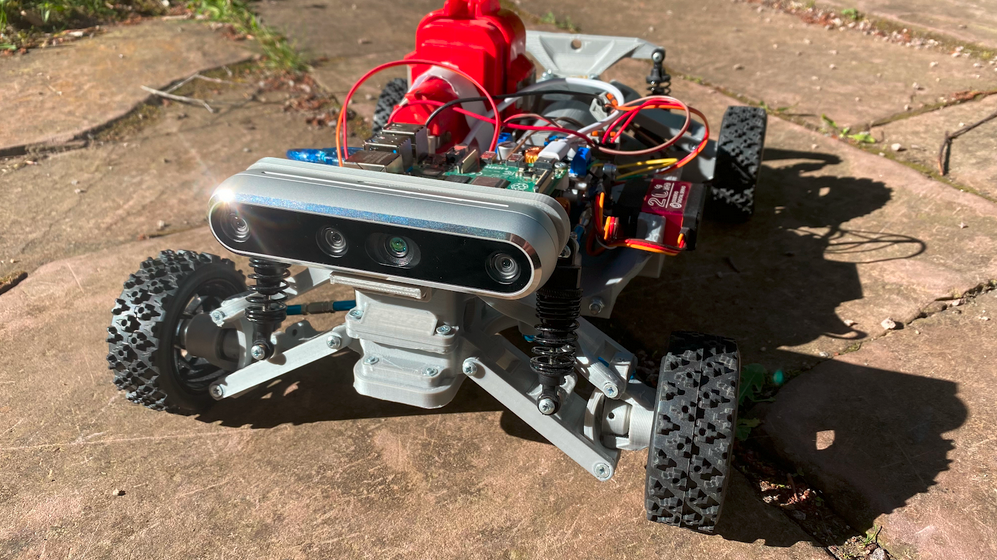
A high-torque vehicle powered by a repurposed drilling machine motor, combining 3D-printed mechanics with ROS-based perception, SLAM, and navigation. Designed as an experimental platform for exploration and autonomous delivery.
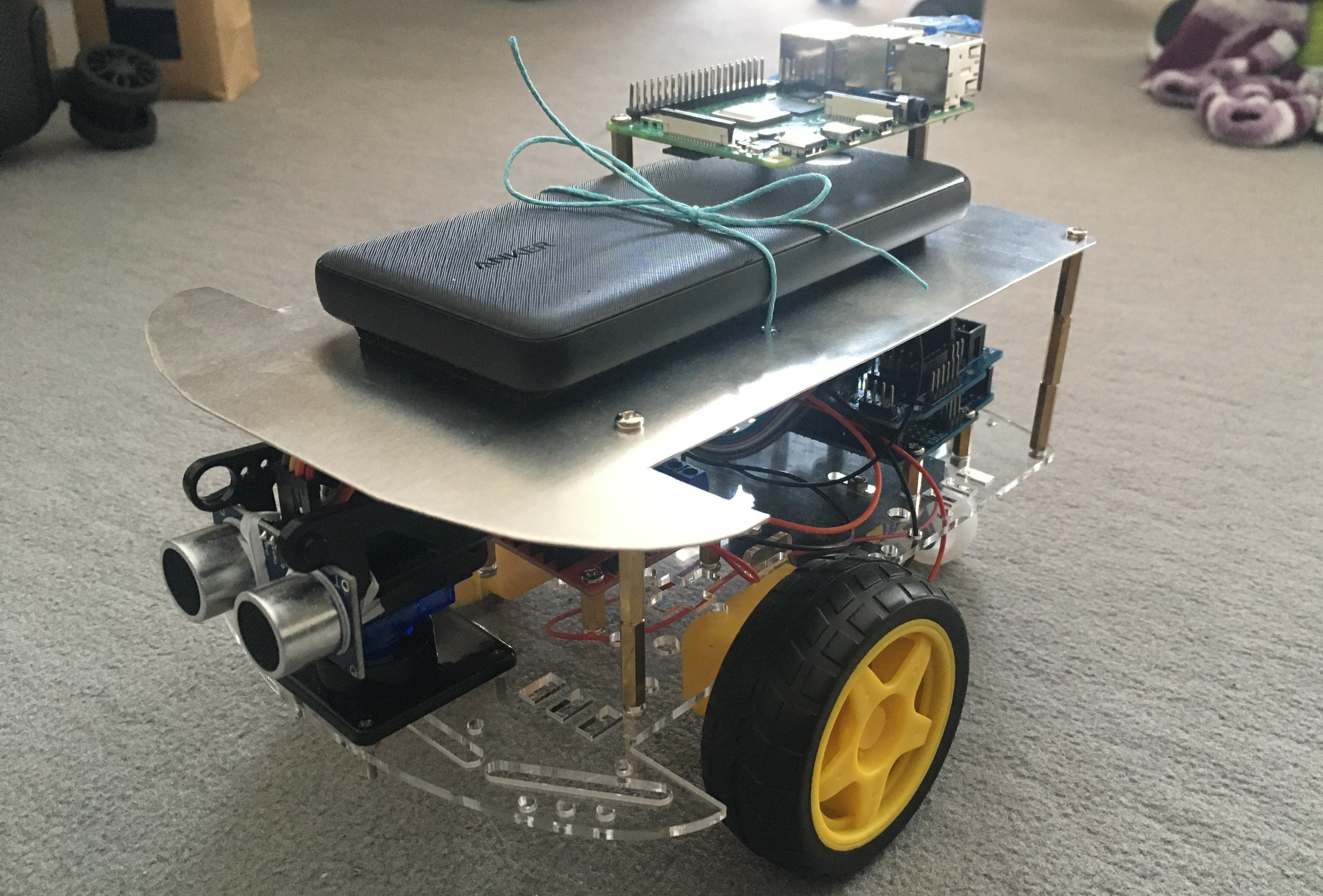
A differential-drive Arduino robot controlled via ROS and an Xbox controller, featuring both teleoperation and autonomous obstacle avoidance. This project introduced the foundations of robotic control architectures and real-time communication pipelines.
An advanced control framework for ROS turtlesim implementing non-blocking goal navigation, feedback control, and intelligent wall avoidance using action-server-based communication.
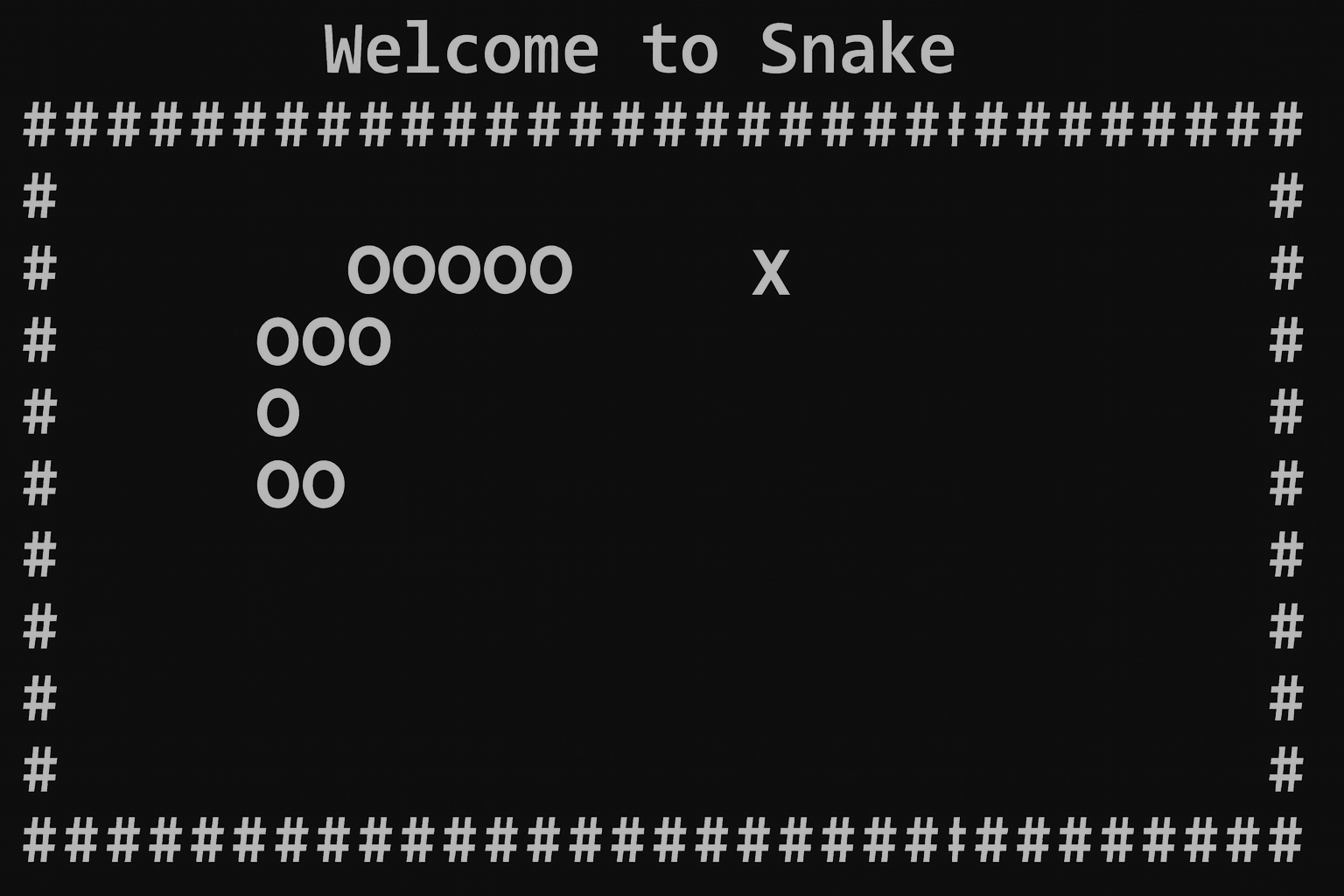
A classic Snake game implemented in pure C++ for the command line, developed as a learning project to explore real-time logic, input handling, and object-oriented programming principles.